Embodied AI is evolving from vision-centric perception toward Physical AI. While vision enables robots to perceive the world, it cannot fully capture the physical interactions that underpin real-world manipulation, limiting robots’ ability to operate reliably in unstructured environments. As World Models advance, tactile sensing is increasingly recognized as a key modality. By providing critical physical feedback beyond vision, tactile helps robots understand and interact with the physical world, making it an essential foundation for intelligent manipulation.
Yet one critical question remains difficult to answer:

How much does tactile sensing actually improve physical interaction?
In what ways does it improve robot manipulation?
What kinds of tactile data are most needed for physical AI?
While many robotics developers believe tactile will play an important role in the next generation of embodied intelligence, the industry lacks a standardized way to evaluate its impact. Without unified benchmarks, it remains challenging to compare systems, measure progress, or determine which tactile perception deliver meaningful improvements in real-world tasks.
To address this challenge, Daimon Robotics has launched RobOmni at ICRA2026, the first omni-modal evaluation benchmark including tactile sensing for physical interaction.
Why tactile matters
Many real-world robotic applications require more than vision alone.
Tasks such as grasping, insertion, assembly, object placement, and tool handling depend heavily on physical interaction. During these operations, robots must continuously interpret contact conditions and adapt their actions accordingly.
Humans naturally rely on tactile to determine whether an object is slipping, how much force is being applied, whether a material is soft or rigid, and how components fit together during assembly. Replicating these capabilities remains one of robotics’ most significant challenges.
Daimon Robotics, an embodied intelligence company from Hong Kong focused on tactile perception and dexterous manipulation, refers to its approach as “omni-modal tactile intelligence”.
Its self-developed vision-based tactile sensors are designed to capture multidimensional tactile information at high frequency and high resolution. Beyond measuring contact force, the sensors can provide information about contact deformation, slip, material properties, geometry, texture, softness, and hardness.
Precisely because tactile sensing provides rich and multidimensional physical feedback, its value and capabilities must be systematically quantified—making a comprehensive tactile benchmark increasingly essential.
Building a benchmark for contact-rich manipulation
RobOmni was developed to provide a reproducible framework for evaluating physical interaction in robotic systems.
Built on NVIDIA Isaac Sim, the platform combines high-fidelity simulation with standardized benchmarks centered on contact-rich manipulation tasks.
The platform provides omni-modal information, including:
High-resolution fingertip tactile sensing
Wrist-mounted RGB vision
Gripper status information
TCP trajectories
Action commands
External camera observations
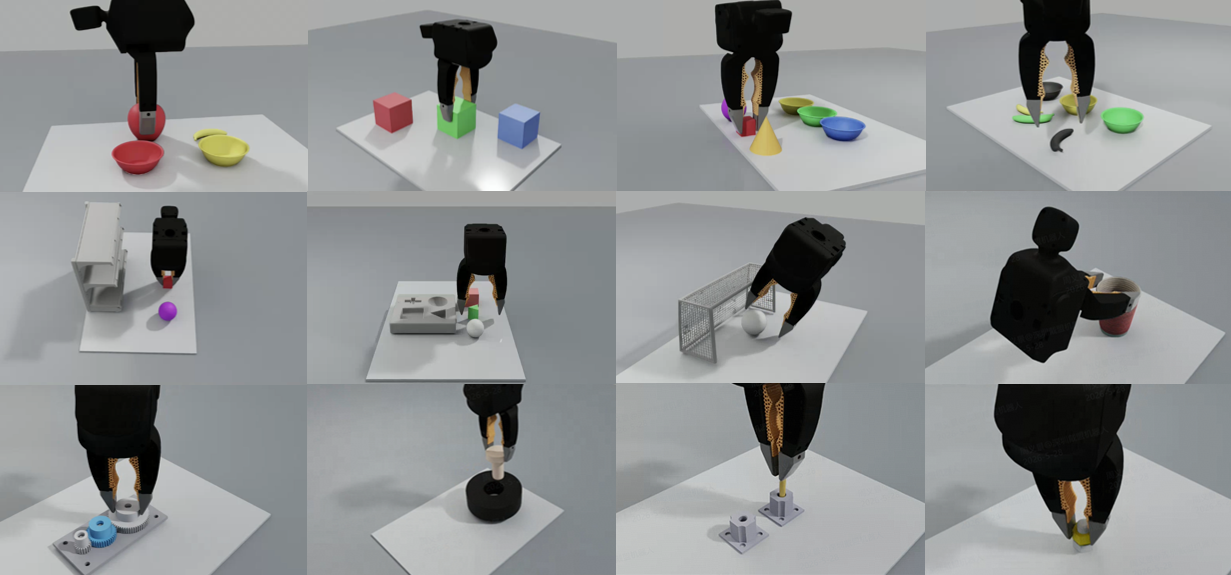
At its core, RobOmni focuses on contact-rich manipulation tasks where tactile information can have a measurable impact.
The benchmark suite includes dozens of manipulation scenarios such as grasping, placement, precision insertion and component assembly.
These tasks were selected because they closely reflect operational challenges commonly encountered in manufacturing, service robotics, and embodied AI applications.
Measuring the contribution of tactile
Task completion alone does not provide a complete picture of robotic capability.
RobOmni evaluates performance across multiple dimensions, including:
Task success rate
Manipulation efficiency
Dexterous manipulation capability
Operation failure events (Slip, Jamming, Collision, Retry)
Generalization robustness
A key feature of the framework is support for tactile ablation testing. By evaluating policies with and without tactile information, developers can directly measure how tactile sensing contributes to task performance.
This enables researchers and robotics developers to move beyond assumptions and quantify the actual value of tactile intelligence during physical interaction.
large-scale, cross-embodiment parallel evaluation
RobOmni includes a 1:1 digital twin of Daimon’s DM-TacClaw tactile gripper and will later expand to five-finger glove simulation suite. It also includes multiple mainstream robot embodiments, including humanoid robots and robotic arms, enabling cross-embodiment evaluation under one unified framework.

RobOmni also supports large-scale parallel evaluation, allowing multiple evaluations to run simultaneously for scalable, rapid validation and benchmarking.
Supporting multiple training pathways
RobOmni is designed to support both simulation-based development and real-world data workflows.
Developers can train models using real-world datasets and validate performance through standardized benchmarking within the platform. Alternatively, policies can be trained directly in simulation and evaluated under the same framework.
The platform supports reinforcement learning, imitation learning, and side-by-side comparisons across different algorithms and model architectures.
This unified workflow helps improve reproducibility while reducing the fragmentation that often exists across robotics development pipelines.
Toward a common standard for tactile intelligence
RobOmni will soon support real-robot validation, streamlining the Sim-to-Real pipeline. This is currently the industry’s most comprehensive standardized evaluation framework centered on tactile perception and dexterous manipulation, filling a critical infrastructure gap for the field.
It helps establish a data flywheel of data accumulation → capability validation → model iteration, thereby accelerating overall industry development.
As physical AI continues to evolve, evaluation infrastructure is becoming increasingly important.
The robotics industry has established benchmarks for perception, navigation, and machine learning performance. Tactile intelligence, however, has lacked a comparable framework.
RobOmni aims to fill that gap by providing a standardized environment for measuring physical interaction in contact-rich manipulations and evaluating the contribution of tactile sensing.
As the industry works toward more capable and adaptable robotic systems, understanding the role of tactile may become just as important as advancing the underlying AI models themselves.
Daimon seeks to drive the convergence of standards for tactile sensing and physical interaction. Only with a unified evaluation framework can Physical AI progress from isolated breakthroughs to scalable advancement, ultimately enabling robots to truly interact with the real-world safely and reliably.
Sponsored content by Daimon




GIPHY App Key not set. Please check settings