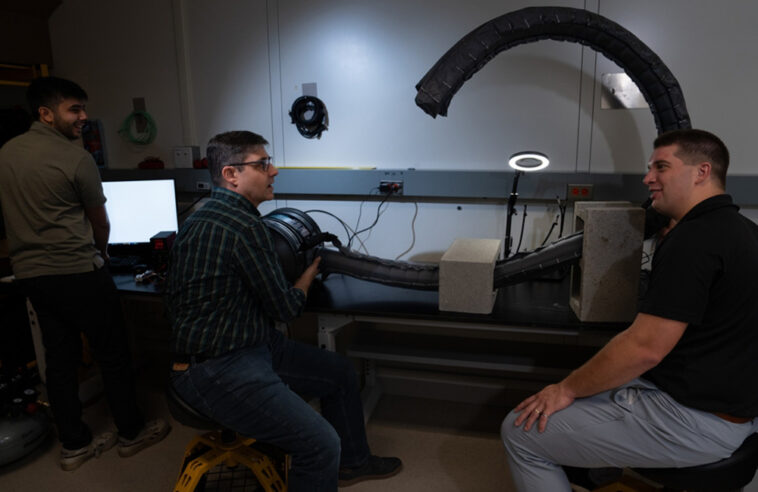
From left to right: Research intern Ankush Dhawan and Lincoln Laboratory staff members Chad Council and Nathaniel Hanson test a vine robot in a laboratory setting. | Source: Glen Cooper, MIT News
Researchers at the MIT Lincoln Laboratory, in collaboration with the University of Notre Dame, have created a vine-like robot that can squeeze between rubble. The robot could ease emergency responders’ burden following disastrous structural collapses.

When a major disaster hits, emergency responders are responsible for searching for people trapped under rubble and carefully extricating these victims from dangerous environments. This grueling, around-the-clock work can stretch for days or weeks, depending on the size of the disaster.
While legged robots are already working in disaster-recovery situations to survey the tops of rubble, they can be damaged in tight, unstable locations. The joint research team created the Soft Pathfinding Robotic Observation Unit, or SPROUT. This new system can maneuver around obstacles and through small spaces.
The soft robot can inflate and deflate with air to wriggle its way under collapsed structures. The MIT–Notre Dame researchers said emergency responders can remotely control it to explore, map, and find optimum ingress routes through debris. It is also designed to be low cost and easy to operate.
“The urban search-and-rescue environment can be brutal and unforgiving, where even the most hardened technology struggles to operate,” Chad Council, a member of the SPROUT team and technical staff member at Lincoln Laboratorytold MIT News. “The fundamental way a vine robot works mitigates a lot of the challenges that other platforms face.”
SPROUT was developed in collaboration with Margaret Coad, a professor at the University of Notre Dame and an MIT graduate. When looking for collaborators, Nathaniel Hanson — a graduate of Notre Dame and the leader of the group — was already aware of Coad’s work on vine robots for industrial inspection.
The design challenges MIT faced with SPROUT
SPROUT is made up of an inflatable tube of airtight fabric. The tube unfurls from a fixed base with a motor that controls the deployment. At the tip of the tube, the team mounted a camera and other sensors. As the tube inflates, it expands into rubble, squeezing through tight passages, while its sensors image and map the environment.
Currently, SPROUT can be operated using joysticks and a screen that displays the robot’s camera feed. It can deploy up to 10 ft. (3 M), and the team is working on expanding it to 25 ft. (7.6 m).
SPROUT’s flexible design makes it capable of getting into small spaces, but it also presented a number of technical challenges for the researchers. For example, the team had to create a control system that could pinpoint how to apply air pressure within the deformable robot so that it moves where the operator is directing it to go.
In addition, the team had to design the tube to minimize friction while the robot grows and engineer the controls for steering.

Register now so you don’t miss out!
Building maps of collapsed areas and testing SPROUT
The MIT team said it has been finding new ways to apply its mobile robot to disaster-relief efforts, like using data captured by the teleoperated system to build maps of subsurface voids.
“Collapse events are rare but devastating events,” Hanson said. “In robotics, we would typically want ground-truth measurements to validate our approaches, but those simply don’t exist for collapsed structures.”
To solve this problem, Hanson and his team made a simulator that allows them to create realistic depictions of collapsed structures and develop algorithms that map void spaces.
Lincoln Laboratory tested SPROUT with first responders at the Massachusetts Task Force 1 training site in Beverly, Mass. The tests allowed the researchers to improve the durability and portability of the robot and learn how to grow and steer the robot more efficiently. The team is planning a larger field study this spring.
“Urban search-and-rescue teams and first responders serve critical roles in their communities but typically have little-to-no research and development budgets,” said Hanson. “This program has enabled us to push the technology readiness level of vine robots to a point where responders can engage with a hands-on demonstration of the system.”
Sensing in constrained spaces is not a problem unique to disaster-response communities, he added. The team envisions the technology being used in the maintenance of military systems or critical infrastructure with difficult-to-access locations. The initial program focused on mapping void spaces, but future work aims to localize hazards and assess the viability and safety of operations through rubble.

Chad Council navigates the robot through rubble at the Massachusetts Task Force 1 site. | Source: MIT Researcher




GIPHY App Key not set. Please check settings