
By Isaiah Dominguez, Director of Marketing, WiBotic

As autonomy moves beyond controlled environments, ruggedized design is becoming a prerequisite for reliable robotic operations.
For years, many autonomous mobile robots were designed around a simple assumption: the operating environment would remain relatively predictable. Warehouse floors were flat. Lighting was consistent. Temperatures were controlled. Connectivity was reliable. In those conditions, autonomy could thrive. Today, that assumption is rapidly changing.
Robots are increasingly being deployed in environments that are far less forgiving. Distribution yards, manufacturing campuses, healthcare facilities, retail operations, construction sites, agricultural applications, and outdoor logistics workflows all present conditions that challenge the traditional boundaries of robotic design. Dust, moisture, vibration, temperature swings, uneven terrain, and inconsistent infrastructure are no longer edge cases. They are becoming normal operating conditions. Industry experts increasingly point to outdoor and semi-structured environments as one of the fastest-growing frontiers for autonomous mobile robotics. As a result, robotics manufacturers are rethinking a fundamental question: What does it take to achieve reliable autonomy when conditions are less than ideal?

While advances in perception, machine learning, and fleet management continue to generate headlines, many of the practical challenges of autonomy are rooted in physical systems. A robot cannot deliver productive work if it cannot maintain power, withstand environmental exposure, or recover from operational disruptions.
Historically, ruggedized design was associated with military systems, mining equipment, or specialized industrial machinery. Today, many commercial robotics manufacturers are adopting similar design philosophies. Components that were once acceptable in controlled environments are being redesigned to tolerate water ingress, airborne contaminants, temperature fluctuations, vibration, and extended duty cycles. This shift is particularly important because autonomy increasingly requires longer operational windows. As organizations pursue higher utilization rates and reduced human intervention, robots must remain available for more hours each day while requiring less maintenance and fewer manual touchpoints. Power infrastructure plays a critical role in achieving that outcome.

In many deployments, charging systems remain one of the most overlooked components in the autonomy stack. Yet power availability directly influences robot uptime, fleet productivity, maintenance requirements, and operational scalability.
As robotic deployments expand into outdoor and industrial environments, their charging systems face the same environmental challenges as the robots themselves. Exposure to moisture, debris, temperature variation, and physical wear can introduce failure points that reduce overall system reliability. For that reason, forward-looking robotics manufacturers are increasingly evaluating charging infrastructure as an integral part of their robotics platform.
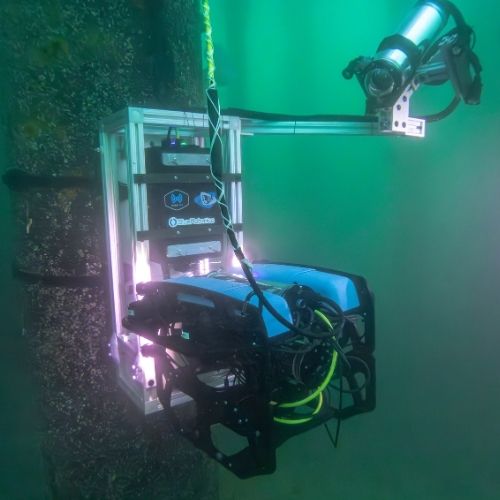
A useful example is the emergence of ruggedized onboard charging systems designed specifically for autonomous operation. Rather than treating charging as a separate subsystem, these solutions integrate programmable charging intelligence, environmental protection, remote monitoring, and communication interfaces directly into the robot architecture.
The WiBotic OC-1000-WP illustrates what this approach can look like in practice. Designed as a waterproof programmable onboard charger, the platform combines wireless and plug-in charging capability, configurable charging profiles, battery management functionality, remote diagnostics, CANbus integration, and an IP65-rated enclosure intended for demanding operating environments. The system is designed to support autonomous charging workflows while helping operators maintain visibility into battery performance and fleet charging behavior.
When charging systems are engineered to tolerate the same environmental conditions as the robot, organizations can reduce dependency on controlled charging areas, minimize maintenance associated with exposed connectors, and support more flexible deployment models. This reflects a broader shift occurring across the robotics industry where success is no longer defined solely by whether a robot can complete a task, but by whether an autonomous system can operate reliably over months and years while adapting to changing operational demands.

As robots move into more challenging environments, reliability becomes a competitive advantage. The companies that will lead the next phase of robotics adoption are likely to be those that design not only for autonomy, but for autonomy under real-world conditions.
Sponsored content by WiBotic



GIPHY App Key not set. Please check settings